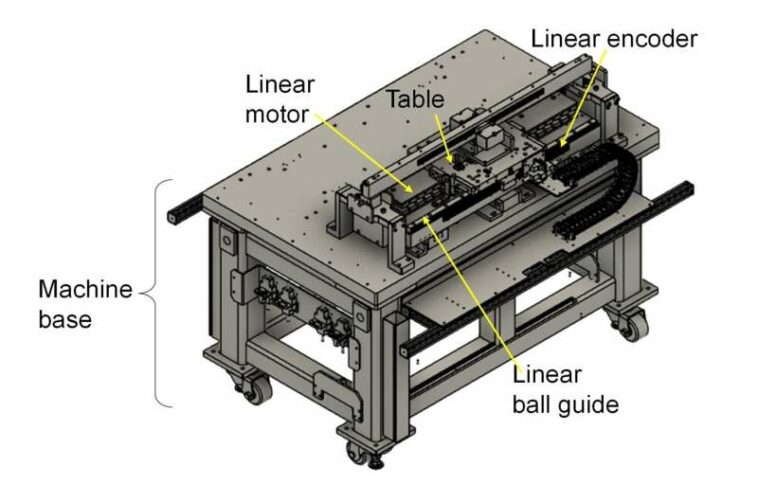

Descripción general de la etapa de ultraprecisión utilizada en el experimento. Crédito: Universidad Tecnológica de Toyohashi
Un equipo de investigación dirigido por el profesor Kaiji Sato (Laboratorio de Robótica y Mecatrónica, Departamento de Ingeniería Mecánica, Universidad Tecnológica de Toyohashi) reveló un método para diseñar con facilidad un sistema de control de posicionamiento ultrapreciso del orden de 10 nm, incluso si el modelo dinámico y se desconocen los parámetros del modelo del mecanismo de movimiento y la base de la máquina en la que está instalado.
Este método de diseño proporciona al sistema de control un controlador NCTF que compensa las características no lineales desconocidas, incluidas las características de fricción, y alcanza la posición objetivo con alta velocidad y precisión, y un compensador de supresión de vibraciones que compensa rápidamente las características de vibración desconocidas causadas por la alta velocidad. conduciendo. Su diseño es simple y se puede diseñar sin experiencia con el diseño del sistema de control o la información de propiedades mecánicas.
En maquinaria industrial, como máquinas herramienta y equipos de fabricación de semiconductores, la precisión de posicionamiento y la respuesta de alta velocidad del mecanismo son características básicas e importantes que afectan el rendimiento del equipo. Sin embargo, a medida que aumenta la precisión requerida, las características microdinámicas causadas por el mecanismo y la base de la máquina en la que se coloca (que antes no eran problemáticas) se vuelven problemáticas.
Una respuesta de alta velocidad genera una gran fuerza de reacción, que excita cada parte del mecanismo. El uso de dispositivos de amortiguación activa y mejoras de hardware es efectivo para suprimir las microvibraciones, pero limitan el alcance de la aplicación y aumentan los costos. El uso de un controlador que use información detallada de las propiedades mecánicas también es efectivo, pero requiere más trabajo y tiempo, y se debe solicitar el ajuste a un experto.

Configuración del sistema de control propuesto. Crédito: Universidad Tecnológica de Toyohashi
Por lo tanto, los investigadores proponen un método para suprimir eficazmente la vibración y lograr un posicionamiento de ultraprecisión utilizando el hardware tal como está, sin necesidad de información de propiedades mecánicas por adelantado, y mediante un diseño y ajuste de controlador simples.
El sistema de control consiste en el Seguimiento de la Trayectoria Característica Nominal (NCTF) propuesto por el profesor Sato y el compensador de supresión de vibraciones que consta de un filtro de paso de banda y un compensador diferencial, y se determina secuencialmente. El papel del compensador es sencillo, ya que hay pocas variables para ajustar y es fácil de determinar sin el conocimiento de un experto.
El primero se puede diseñar incorporando una forma de onda de respuesta de bucle abierto para una señal de entrada dada y ajustando las dos ganancias paso a paso. Este último se completa determinando las dos ganancias secuencialmente. El sistema de control resultante logra un posicionamiento ultrapreciso incluso para mecanismos con marcadas características no lineales, como las características de fricción. Este último también se puede utilizar en combinación con otros sistemas de control. La eficacia del método de diseño del sistema de control propuesto ha sido demostrada mediante experimentos.
 Error del sistema de control convencional del NCTF (b) Error del sistema de control propuesto. Crédito: Ingeniería de precisión (2022). DOI: 10.1016/j.precisioneng.2022.11.008")
(a) Error del sistema de control convencional del NCTF (b) Error del sistema de control propuesto. Crédito: Ingeniería de precisión (2022). DOI: 10.1016/j.precisioneng.2022.11.008
Existe una demanda creciente de alta aceleración, alta velocidad y precisión mejorada en maquinaria industrial, lo que lo convierte en un tema importante al desarrollar maquinaria industrial de alto rendimiento. Esta investigación fue realizada conjuntamente por el profesor Kaiji Sato, que quiere hacer uso de los conocimientos de su laboratorio universitario en el mundo real, y NEOMAX Engineering, que quiere resolver problemas en cooperación con universidades. Este documento muestra el logro de la meta original y los resultados básicos.
En el artículo, el sistema de control se ajusta para suprimir dos tipos de vibración con diferentes propiedades. También hay escenarios en los que se produce vibración con muchas frecuencias diferentes, escenarios en los que los criterios de la vibración a suprimir son diferentes y escenarios en los que la naturaleza de la vibración es diferente. Los investigadores quieren aumentar la cantidad de escenarios que pueden manejar y, finalmente, revelar cómo resolver estos problemas de manera integral.
La investigación se publica en la revista Ingeniería de precisión.
Más información:
Kaiji Sato et al, Diseño de controlador para posicionamiento ultrapreciso y de alta velocidad de una etapa de movimiento lineal en una base de máquina vibratoria control de etapa en una base vibratoria, Ingeniería de precisión (2022). DOI: 10.1016/j.precisioneng.2022.11.008
Citación: Posicionamiento de alta velocidad y alta precisión de etapas con características de vibración desconocidas (7 de febrero de 2023) consultado el 7 de febrero de 2023 en https://techxplore.com/news/2023-02-high-speed-high-precision-positioning- etapas-desconocidas.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.

