Quedan innumerables grandes problemas por resolver en el mundo de la automatización, y el aprendizaje robótico se encuentra en algún lugar cerca de la cima. Si bien es cierto que los humanos se han vuelto bastante buenos programando sistemas para tareas específicas, hay una gran pregunta abierta: ¿y luego qué?
Una nueva investigación demostrada en el evento de IA de Google en la ciudad de Nueva York esta mañana propone la noción de permitir que los sistemas robóticos escriban efectivamente su propio código. El concepto está diseñado para ahorrar a los desarrolladores humanos la molestia de tener que entrar y reprogramar cosas a medida que surge nueva información.
Créditos de imagen: Google
La empresa señala que la investigación existente y los modelos capacitados pueden ser efectivos para implementar el concepto. Todo ese trabajo puede resultar fundamental en el desarrollo de sistemas que puedan continuar generando su propio código basado en objetos y escenarios encontrados en el mundo real. El nuevo trabajo que se exhibe hoy es Code as Policies (CaP).
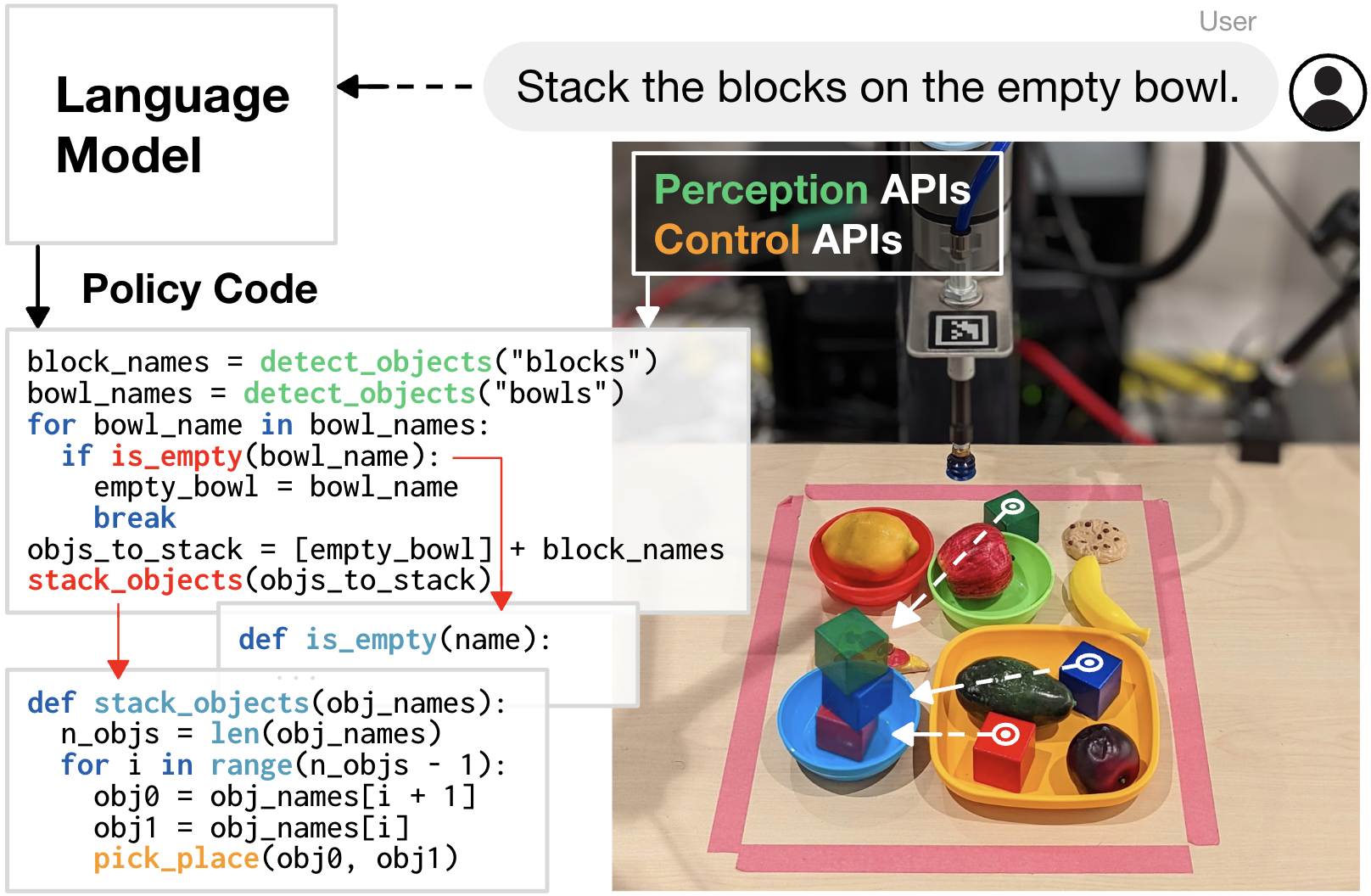
Créditos de imagen: Google
Jacky Liang, pasante de investigación de Google, y Andy Zeng, científico de investigación en robótica, escriben en una entrada de blog:
Con CaP, proponemos el uso de modelos de lenguaje para escribir código de robot directamente a través de indicaciones de pocos intentos. Nuestros experimentos demuestran que la salida del código condujo a una mejor generalización y rendimiento de tareas en comparación con el aprendizaje directo de las tareas del robot y la salida de acciones en lenguaje natural. CaP permite que un solo sistema realice una variedad de tareas robóticas complejas y variadas sin capacitación específica para la tarea.
El sistema, como se describe, también se basa en bibliotecas y API de terceros para generar mejor el código adecuado para un escenario específico, así como soporte para idiomas y (¿por qué no?) emojis. La información accesible en esas APIs es una de las limitaciones existentes en la actualidad. Los investigadores señalan: «Estas limitaciones apuntan a vías para el trabajo futuro, incluida la extensión de modelos de lenguaje visual para describir comportamientos de robots de bajo nivel (por ejemplo, trayectorias) o la combinación de CaP con algoritmos de exploración que pueden agregarse de forma autónoma al conjunto de primitivas de control».
Como parte del anuncio de hoy, Google está lanzando versiones de código abierto del código accesibles a través de su sitio GitHub para construir sobre la investigación que se ha presentado hasta ahora. Entonces, ya sabes, todas las advertencias sobre las cosas de investigación en etapa inicial aquí.

