, que mantiene un contacto constante con la estación base, y varios drones de seguimiento (UAV n), algunos de los cuales difieren en términos de diseño. Los datos recopilados se procesan en el enjambre, al igual que la priorización y distribución de tareas. El objetivo es que el enjambre cumpla su misión sin intervención humana. Crédito: HZDR/Casus")
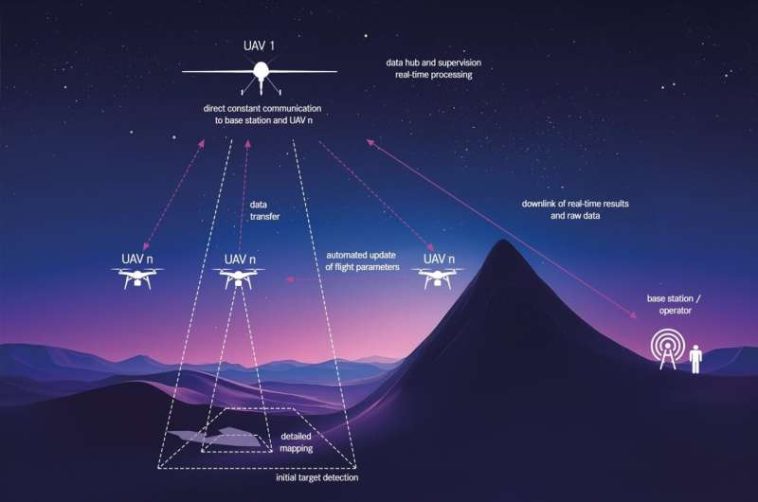
El concepto presentado para un enjambre de vehículos aéreos no tripulados que funcionan de forma autónoma se basa en un dron líder (UAV 1), que mantiene un contacto constante con la estación base, y varios drones de seguimiento (UAV n), algunos de los cuales difieren en términos de diseño. Los datos recopilados se procesan en el enjambre, al igual que la priorización y distribución de tareas. El objetivo es que el enjambre cumpla su misión sin intervención humana. Crédito: HZDR/Casus
Los vehículos aéreos no tripulados (UAV), comúnmente conocidos como drones, son omnipresentes y han ganado popularidad debido a su amplio uso potencial en muchos sectores civiles. Equipados con sensores sofisticados y dispositivos de comunicación, los drones pueden potencialmente formar un sistema multi-UAV, también llamado enjambre.
Científicos del Instituto Helmholtz de Tecnología de Recursos de Freiberg y del Centro para la Comprensión de Sistemas Avanzados, ambas instituciones del HZDR, llevaron a cabo pruebas experimentales para establecer un marco conceptual para un enjambre autónomo con la tarea específica de escanear de manera eficiente entornos estructurados de manera desigual. Las pruebas han demostrado que el concepto de enjambre desarrollado es más resistente en comparación con otros.
El creciente interés por los drones y el deseo de nuevas aplicaciones, pero también los diferentes tamaños de UAV, que influyen en el tiempo de vuelo y la carga útil de los sensores, han llevado a la aparición de enjambres de drones o sistemas multi-UAV.
Un enjambre de UAV inteligentes es una flota de drones autónomos que cooperan según un conjunto específico de reglas para llevar a cabo una misión compleja de manera eficiente y sin intervención humana. Al tener varios drones trabajando juntos en grupos jerárquicos, se pueden superar las limitaciones de los UAV individuales para poder completar muchas tareas distribuidas a la vez.
El marco conceptual propuesto se basa en el paradigma líder-seguidores, donde el dron líder distribuye las tareas a los seguidores.
«Nuestra investigación tiene como objetivo mejorar la prosperidad económica, el desarrollo social y la protección del medio ambiente, por ejemplo mitigando los peligros naturales, mapeando la superficie de la Tierra para encontrar nuevos recursos o monitoreando el medio ambiente», dice el Dr. Wilfried Yves Hamilton Adoni, científico del HIF y CASUS. sobre los antecedentes de la investigación de sistemas multi-UAV.
«Modelamos varios obstáculos que pueden ocurrir durante una misión de enjambre en un entorno estructurado de manera desigual, es decir, un entorno donde áreas complejas y ricas en información se alternan con áreas pobres en información. En comparación con las configuraciones actuales de enjambre de UAV disponibles, nuestro sistema propuesto es más resistente ya que puede recuperarse rápidamente de fallas del sistema.
«Hemos realizado las pruebas considerando el estado actual de la técnica en enjambres de vehículos aéreos no tripulados tanto virtuales como reales. Muestran que nuestro sistema es fiable, digno de confianza y funciona consistentemente bien. Por ejemplo, nuestro enfoque confirma un buen rendimiento en términos de consumo de energía para nuestro escenario de grandes superficies estructuradas de forma desigual», continúa Adoni.
En concreto, en un artículo publicado en octubre en la revista DronesAdoni presentó los puntos clave que los científicos deberían considerar al diseñar un sistema autónomo de múltiples UAV para su misión de investigación. Analiza aspectos como las cadenas de mando y la creación de consenso entre los UAV, la comunicación entre el líder y los seguidores y la distribución de cálculos entre los UAV utilizando una configuración de ejemplo específica.
«Actualmente estamos trabajando en un marco de software de código abierto para un sistema operativo de robot que sea especialmente adecuado para este tipo de misiones enjambres», explica Adoni. «El valor añadido de dicho marco es que contiene un conjunto de potentes funciones que son relevantes para llevar a cabo misiones autónomas en entornos desafiantes».
Desafíos para las misiones autónomas de enjambre
La capacidad de los vehículos aéreos no tripulados para llegar a regiones inaccesibles es un beneficio importante para las misiones exploratorias. Dado que un enjambre puede adaptarse fácilmente en tamaño para cubrir un área grande en poco tiempo, son adecuados para misiones de reconocimiento y vigilancia. Las grabaciones de cada UAV se pueden mostrar como visualización 3D en tiempo real. Esto permite al operador lograr un mapeo realista del entorno.
Pero también hay desafíos. Las dificultades más comunes a afrontar son la evitación de colisiones y la detección de obstáculos. Además, el consumo de energía y la duración de la batería siguen siendo problemas importantes. Además, los requisitos legales para el uso de vehículos aéreos no tripulados difieren de un país a otro.
Los enjambres de UAV están diseñados como sistemas totalmente distribuidos en los que cada dron analiza su propio entorno y colabora con otros para llevar a cabo acciones individuales que contribuyen colectivamente al logro de un objetivo general del enjambre.
El principio operativo de los enjambres se basa en una familia de algoritmos que permiten a cada unidad de enjambre comunicarse y delegar tareas de misión, planificar trayectorias y coordinar vuelos para lograr de manera eficiente los objetivos generales del enjambre. Estos algoritmos generalmente operan en una arquitectura altamente jerárquica, lo que le da al enjambre cierta autonomía en diferentes niveles.
Como resultado, la responsabilidad del operador humano puede limitarse a una supervisión básica y una participación de alto nivel sin acción directa.
Más información:
Wilfried Yves Hamilton Adoni et al, Enjambre inteligente: concepto, diseño y validación de vehículos aéreos no tripulados autoorganizados basados en el paradigma líder-seguidores para la planificación de misiones autónomas, Drones (2024). DOI: 10.3390/drones8100575
Proporcionado por Helmholtz-Zentrum Dresden-Rossendorf
Citación: Enjambre inteligente: trabajar en equipo también es relevante para los drones (2024, 26 de noviembre) recuperado el 26 de noviembre de 2024 de https://techxplore.com/news/2024-11-intelligent-swarm-team-relevant-drones.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.


GIPHY App Key not set. Please check settings