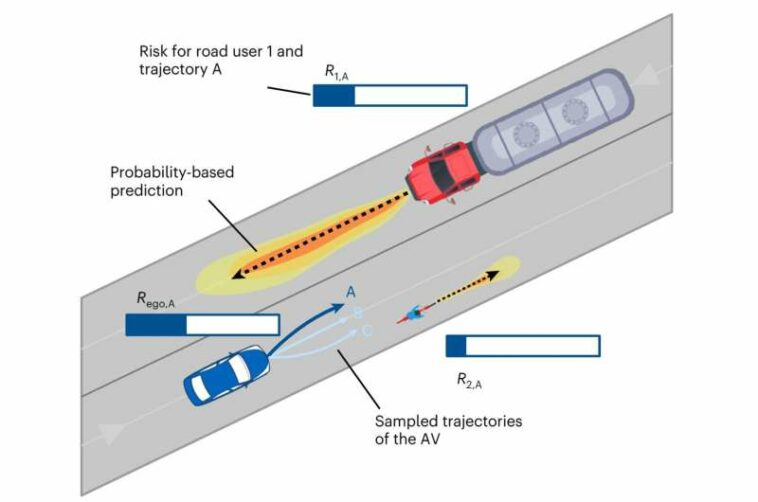
 y un valor de daño estimado, a cada trayectoria del AV se le pueden asignar valores de riesgo para cada usuario de la vía. Crédito: Nature Machine Intelligence (2023). DOI: 10.1038/s42256-022-00607-z")
Planificación de trayectorias en base a la distribución de riesgos. Sobre la base de una predicción basada en la probabilidad de todos los usuarios de la vía (que se muestra aquí como mapas de calor alrededor de las predicciones negras más probables) y un valor de daño estimado, a cada trayectoria del AV se le pueden asignar valores de riesgo para cada usuario de la vía. Crédito: Naturaleza Máquina Inteligencia (2023). DOI: 10.1038/s42256-022-00607-z
Investigadores de la Universidad Técnica de Munich (TUM) han desarrollado un software de conducción autónoma que distribuye el riesgo en la calle de manera justa. Se considera que el algoritmo contenido en el software es el primero en incorporar las 20 recomendaciones éticas del grupo de expertos de la Comisión de la UE, por lo que toma decisiones significativamente más diferenciadas que los algoritmos anteriores.
La operación de vehículos automatizados se hará significativamente más segura mediante la evaluación de los diversos grados de riesgo para peatones y automovilistas. El código está disponible para el público en general como software de código abierto.
La realización técnica no es el único obstáculo que debe superarse antes de que los vehículos de conducción autónoma puedan circular por las calles a gran escala. Las cuestiones éticas juegan un papel importante en el desarrollo de los algoritmos correspondientes: el software debe ser capaz de manejar situaciones imprevisibles y tomar las decisiones necesarias en caso de un accidente inminente.
Los investigadores de TUM ahora han desarrollado el primer algoritmo ético para distribuir de manera justa los niveles de riesgo en lugar de operar con un principio de uno u otro. Se probaron aproximadamente 2.000 escenarios de situaciones críticas, distribuidos en varios tipos de calles y regiones como Europa, Estados Unidos y China. El trabajo de investigación publicado en la revista Naturaleza Máquina Inteligencia es el resultado conjunto de una asociación entre la Cátedra TUM de Tecnología Automotriz y la Cátedra de Ética Empresarial del Instituto TUM de Ética en Inteligencia Artificial (IEAI).
Maximilian Geisslinger, científico de la Cátedra de Tecnología Automotriz de la TUM, explica el enfoque: «Hasta ahora, los vehículos autónomos siempre se enfrentaban a una elección de uno u otro cuando se enfrentaban a una decisión ética. Pero el tráfico de la calle no necesariamente se puede dividir en claro: corte, situaciones en blanco y negro; mucho más, los innumerables tonos grises intermedios también deben ser considerados. Nuestro algoritmo sopesa varios riesgos y hace una elección ética entre miles de comportamientos posibles, y lo hace en cuestión de solo una fracción. de un segundo».
Más opciones en situaciones críticas
Los parámetros éticos básicos en los que se orienta la evaluación de riesgos del software fueron definidos por un panel de expertos como una recomendación escrita en nombre de la Comisión de la UE en 2020. La recomendación incluye principios básicos como la prioridad para los más desfavorecidos y la distribución justa del riesgo. entre todos los usuarios de la vía. Para traducir estas reglas en cálculos matemáticos, el equipo de investigación clasificó los vehículos y las personas que se mueven en las calles en función del riesgo que presentan para los demás y de la respectiva disposición a correr riesgos.
Un camión, por ejemplo, puede causar daños graves a otros participantes del tráfico, mientras que en muchos escenarios el camión solo experimentará daños menores. Lo contrario es el caso de una bicicleta. En el siguiente paso, se le dijo al algoritmo que no excediera un riesgo máximo aceptable en las diversas situaciones de calle respectivas. Además, el equipo de investigación agregó variables al cálculo que dan cuenta de la responsabilidad por parte de los participantes del tránsito, por ejemplo, la responsabilidad de obedecer las normas de tránsito.
Los enfoques anteriores trataban situaciones críticas en la calle con solo un pequeño número de maniobras posibles; en casos poco claros, el vehículo simplemente se detuvo. La evaluación de riesgos ahora integrada en el código de los investigadores da como resultado más grados de libertad posibles con menos riesgo para todos. Un ejemplo ilustrará el enfoque: un vehículo autónomo quiere adelantar a una bicicleta, mientras que un camión se acerca por el carril contrario. Ahora se utilizan todos los datos existentes sobre el entorno y los participantes individuales.
¿Se puede adelantar a la bicicleta sin conducir en el carril de tráfico que se aproxima y al mismo tiempo mantener una distancia segura con la bicicleta? ¿Cuál es el riesgo que representa para cada vehículo respectivo y qué riesgo constituyen estos vehículos para el propio vehículo autónomo? En casos poco claros, el vehículo autónomo con el nuevo software siempre espera hasta que el riesgo para todos los participantes sea aceptable. Se evitan las maniobras agresivas y, al mismo tiempo, el vehículo autónomo no se congela y frena bruscamente. Sí y No son irrelevantes, reemplazados por una evaluación que contiene una gran cantidad de opciones.
‘La sola consideración de las teorías éticas tradicionales resultó en un callejón sin salida’
«Hasta ahora, a menudo se contemplaban teorías éticas tradicionales para derivar decisiones moralmente permisibles tomadas por vehículos autónomos. Esto finalmente llevó a un callejón sin salida, ya que en muchas situaciones de tráfico no había otra alternativa que violar un principio ético», dice Franziska Poszler, científico de la Cátedra TUM de Ética Empresarial. «Por el contrario, nuestro marco pone la ética del riesgo en el centro. Esto nos permite tener en cuenta las probabilidades para hacer evaluaciones más diferenciadas».
Los investigadores enfatizaron el hecho de que incluso los algoritmos que se basan en la ética del riesgo, aunque pueden tomar decisiones basadas en los principios éticos subyacentes en cada situación de tráfico posible, aún no pueden garantizar un tráfico en las calles sin accidentes. En el futuro, además, será necesario considerar más diferenciaciones, como las diferencias culturales en la toma de decisiones éticas.
Hasta ahora el algoritmo desarrollado en la TUM ha sido validado en simulaciones. En el futuro, el software se probará en la calle utilizando el vehículo de investigación EDGAR. El código que incorpora los resultados de las actividades de investigación está disponible como software de código abierto. TUM contribuye así al desarrollo de vehículos autónomos viables y seguros.
Más información:
Maximilian Geisslinger et al, Un algoritmo de planificación de trayectoria ética para vehículos autónomos, Naturaleza Máquina Inteligencia (2023). DOI: 10.1038/s42256-022-00607-z
Proyecto «ANDRE—Ética de la conducción autónoma»: www.ieai.sot.tum.de/research/a … mous-driving-ethics/
Citación: Conducción autónoma: el nuevo algoritmo distribuye el riesgo de manera justa (3 de febrero de 2023) consultado el 3 de febrero de 2023 en https://techxplore.com/news/2023-02-autonomous-algorithm.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.

