
Un equipo de la Universidad Carnegie Mellon ha diseñado un sistema robótico de cuatro patas que puede caminar sobre una barra de equilibrio, probablemente el primero. Crédito: Universidad Carnegie Mellon
Investigadores del Instituto de Robótica (RI) de la Universidad Carnegie Mellon han diseñado un sistema que hace que un robot cuadrúpedo listo para usar sea lo suficientemente ágil como para caminar sobre una barra de equilibrio estrecha, una hazaña que probablemente sea la primera de su tipo.
«Este experimento fue enorme», dijo Zachary Manchester, profesor asistente en el RI y director del Laboratorio de Exploración Robótica. «No creo que nadie haya hecho antes con éxito una caminata en barra de equilibrio con un robot».
Según el conocimiento del equipo, esta es la primera instancia de un cuadrúpedo que camina con éxito sobre una barra de equilibrio estrecha. su papel, «Equilibrio mejorado para robots con patas que utilizan ruedas de reacción«, fue aceptado en la Conferencia Internacional de Robótica y Automatización 2023. La conferencia anual se llevará a cabo del 29 de mayo al 2 de junio en Londres.
Al aprovechar el hardware que se usa a menudo para controlar los satélites en el espacio, Manchester y su equipo compensaron las limitaciones existentes en el diseño del cuadrúpedo para mejorar sus capacidades de equilibrio.
Los elementos estándar de la mayoría de los robots cuadrúpedos modernos incluyen un torso y cuatro patas, cada una de las cuales termina en un pie redondeado, lo que permite al robot atravesar superficies planas básicas e incluso subir escaleras. Su diseño se asemeja a un animal de cuatro patas, pero a diferencia de los guepardos que pueden usar sus colas para controlar giros bruscos o gatos que caen y ajustan su orientación en el aire con la ayuda de sus espinas flexibles, los robots cuadrúpedos no tienen tal agilidad instintiva. Siempre que tres de los pies del robot permanezcan en contacto con el suelo, puede evitar que se vuelque. Pero si solo uno o dos pies están en el suelo, el robot no puede corregir fácilmente las perturbaciones y tiene un riesgo mucho mayor de caerse. Esta falta de equilibrio hace que caminar sobre terrenos irregulares sea particularmente difícil.
«Con los métodos de control actuales, el cuerpo y las piernas de un robot cuadrúpedo están desacoplados y no se hablan entre sí para coordinar sus movimientos», dijo Manchester. «Entonces, ¿cómo podemos mejorar su equilibrio?»
La solución del equipo emplea un sistema de actuador de rueda de reacción (RWA) que se monta en la parte posterior de un robot cuadrúpedo. Con la ayuda de una técnica de control novedosa, el RWA permite que el robot se equilibre independientemente de la posición de sus pies.
Los RWA se utilizan ampliamente en la industria aeroespacial para controlar la actitud de los satélites mediante la manipulación del momento angular de la nave espacial.
«Básicamente tienes un gran volante con un motor adjunto», dijo Manchester, quien trabajó en el proyecto con el estudiante graduado de RI Chi-Yen Lee y los estudiantes graduados de ingeniería mecánica Shuo Yang y Benjamin Boksor. «Si giras el pesado volante en un sentido, hace que el satélite gire en el otro sentido. Ahora toma eso y ponlo en el cuerpo de un robot cuadrúpedo».

Crédito: Universidad Carnegie Mellon
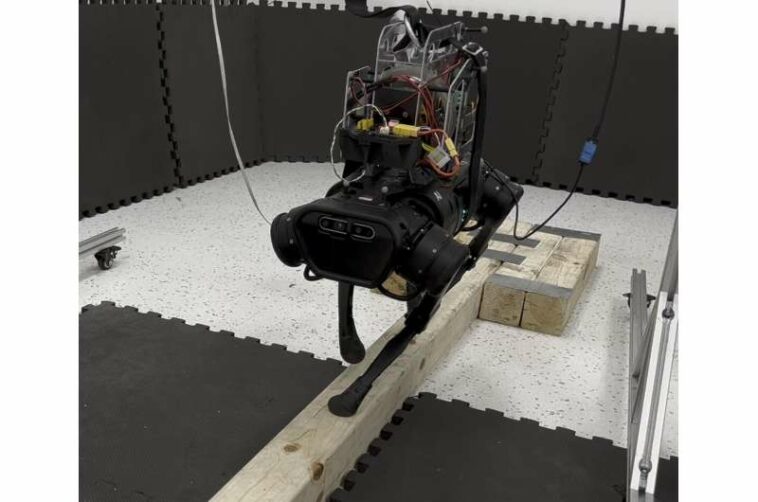
El equipo creó un prototipo de su enfoque al montar dos RWA en un robot comercial Unitree A1, uno en el eje de cabeceo y otro en el eje de balanceo, para proporcionar control sobre el momento angular del robot. Con el RWA, no importa si las piernas del robot están en contacto con el suelo o no, porque los RWA proporcionan un control independiente de la orientación del cuerpo.
Manchester dijo que era fácil modificar un marco de control existente para tener en cuenta los RWA porque el hardware no cambia la distribución de masa del robot, ni tiene las limitaciones conjuntas de una cola o una columna vertebral. Sin necesidad de tener en cuenta tales restricciones, el hardware se puede modelar como un girostato (un modelo idealizado de una nave espacial) e integrarse en un algoritmo de control predictivo de modelo estándar.
El equipo probó su sistema con una serie de experimentos exitosos que demostraron la capacidad mejorada del robot para recuperarse de impactos repentinos. En la simulación, imitaron el clásico problema del gato que cae al dejar caer el robot boca abajo desde casi medio metro, y los RWA permitieron que el robot se reorientara en el aire y aterrizara sobre sus pies. En el hardware, mostraron la capacidad del robot para recuperarse de las perturbaciones, así como la capacidad de equilibrio del sistema, con un experimento en el que el robot caminó a lo largo de una barra de equilibrio de 6 centímetros de ancho.
Manchester predice que los robots cuadrúpedos pronto pasarán de ser principalmente plataformas de investigación en laboratorios a productos de uso comercial ampliamente disponibles, similar a donde estaban los drones hace unos 10 años. Y con el trabajo continuo para mejorar las capacidades de estabilización de un robot cuadrúpedo para que coincida con los animales instintivos de cuatro patas que inspiraron su diseño, podrían usarse en escenarios de alto riesgo como búsqueda y rescate en el futuro.
«Los cuadrúpedos son la próxima gran cosa en robots», dijo Manchester. «Creo que vas a ver muchos más de ellos en la naturaleza en los próximos años».
Citación: El equipo diseña un sistema robótico de cuatro patas que puede caminar sobre una barra de equilibrio (17 de abril de 2023) consultado el 17 de abril de 2023 en https://techxplore.com/news/2023-04-team-four-legged-robotic.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.

