

Arquitectura de hardware genérica para aplicaciones robóticas de diseño FPGA. Crédito: Podlubne et al.
A medida que los robots se vuelven cada vez más sofisticados y avanzados, normalmente requerirán una cantidad cada vez mayor de componentes de hardware, incluidos miembros robóticos, motores, sensores y actuadores. Además, los robots tienen computadoras integradas que procesan los datos recopilados por sus sensores y planifican sus acciones futuras en consecuencia.
Sin embargo, la mayoría de las soluciones de software que se ejecutan actualmente en estos equipos no son ideales, ya que sus limitaciones de velocidad les impiden procesar cantidades particularmente grandes en tiempo real. Una forma posible de mejorar las capacidades de las computadoras integradas dentro de los robots es usar arreglos de puertas programables en campo (FPGA), dispositivos semiconductores basados en una matriz de bloques lógicos configurables que están conectados a través de interconexiones programables.
Una ventaja significativa de estos dispositivos es que se pueden reprogramar para adaptarse a aplicaciones específicas. Los FPGA podrían mejorar significativamente las capacidades informáticas de los robots, al mismo tiempo que los hacen más adaptables a aplicaciones específicas. Sin embargo, incorporarlos a los sistemas existentes hasta ahora ha demostrado ser un gran desafío, ya que el uso de aceleradores individuales con capacidades de integración específicas limita su aplicabilidad.
Investigadores de Technische Universität Dresden (TUD) han desarrollado recientemente una técnica que podría permitir el desarrollo de robots que integran numerosos aceleradores de hardware. Esta técnica, presentada en un artículo publicado en Acceso IEEE, en última instancia, podría facilitar el reemplazo de los componentes de software existentes que alimentan los sistemas robóticos con componentes basados en FPGA.
«Este trabajo está en el contexto de el proyecto CeTI, que tiene como objetivo mejorar las colaboraciones entre humanos y máquinas o, más generalmente, sistemas ciberfísicos (CPS) en entornos reales, virtuales y remotos «, dijo a TechXplore Ariel Podlubne, uno de los investigadores que llevó a cabo el estudio. , es un trabajo interdisciplinario que combina investigación de hardware (Presidente de Adaptive Dynamic Systems) y modelado de software (Cátedra de Tecnología de Software). «
El nuevo estudio de Podlubne y sus colegas es una extensión de su investigación anterior, que exploró posibles formas de integrar FPGA en sistemas robóticos. El enfoque que presentaron realiza un análisis exhaustivo de las especificaciones de los mensajes asociados con el sistema operativo del robot (ROS), los sistemas operativos ROS2 y potencialmente otras soluciones de software. Luego, utiliza los resultados de este análisis para generar interfaces de hardware y arquitecturas para sistemas robóticos.
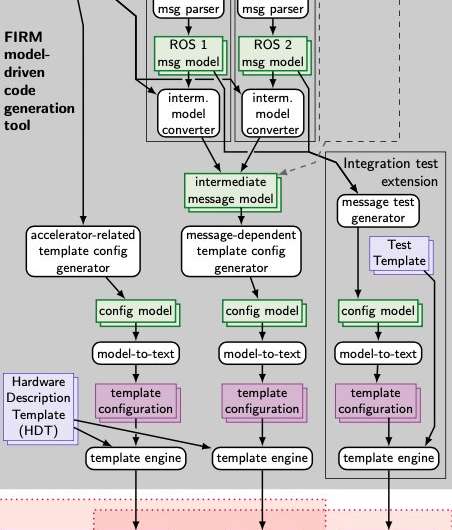
Se utiliza una compleja cadena de herramientas de generación de código basada en modelos por etapas para generar las interfaces de hardware. Crédito: Podlubne et al.
«Nuestro trabajo demuestra la capacidad de generar un sistema complejo basado en FPGA a partir de una descripción simple de la aplicación, basada en una especificación conocida para roboticistas (mensajes ROS)», dijo Podlubne. «Con eso, las partes de un sistema robótico pueden ser reemplazadas por una FPGA, creando sistemas de mejor desempeño y más eficientes energéticamente».
La cadena de herramientas puede generar todos los componentes necesarios para crear un sistema robótico de alto rendimiento, excluyendo solo la lógica del acelerador, que deberá ser programada por los desarrolladores que trabajan en el sistema. Por lo tanto, el nuevo enfoque puede simplificar significativamente la interconexión de arquitecturas de hardware y componentes de software, lo que puede ser una tarea engorrosa para quienes crean robots.
Inicialmente, los investigadores demostraron que su método puede generar componentes de hardware para sistemas basados en el sistema operativo ROS. Sin embargo, luego pudieron ampliar sus funcionalidades para que también fuera compatible con el sistema operativo ROS2.
«Un esfuerzo complementario fue la infraestructura de prueba», dijo Podlubne. «Dimos un paso más para evaluar todos los mensajes ROS existentes, más allá de algunos casos de uso. Esto resultó ser extremadamente útil ya que el proceso de desarrollo implica múltiples iteraciones para tener una solución robusta. Nuestro objetivo era lograr el soporte completo de ROS / ROS2, y nuestro La infraestructura de pruebas nos permitió detectar errores y generar confianza en nuestra investigación «.
En el futuro, el enfoque podría allanar el camino hacia el desarrollo de sistemas robóticos de mejor rendimiento basados en FPGA. Estos sistemas podrían ser capaces de analizar grandes cantidades de datos en tiempo real y, por lo tanto, podrían ayudar a los humanos a resolver problemas más complejos.
«Nuestros próximos estudios se centrarán en extender la cadena de herramientas para automatizar la inserción de aceleradores FPGA (donde se realiza el cálculo) e incluir la Reconfiguración Parcial Dinámica (DPR) para cambiar los aceleradores sobre la marcha, de acuerdo con las necesidades actuales de la aplicación que está desplegado «, agregó Podlubne.
Una política para permitir el uso de manipuladores de uso general en el hockey de aire con robots de alta velocidad.
Ariel Podlubne et al, Enfoque basado en modelos para la generación automática de arquitecturas de hardware para robótica, Acceso IEEE (2021). DOI: 10.1109 / ACCESS.2021.3119061
Ariel Podlubne et al, FPGA-ROS: Metodología para aumentar el sistema operativo del robot con diseños FPGA, Conferencia Internacional 2019 sobre Computación ReConFigurable y FPGAs (ReConFig) (2020). DOI: 10.1109 / ReConFig48160.2019.8994719
Johannes Mey et al, Gramáticas de atributos de referencia relacionales: mejora de la validación continua del modelo, Revista de lenguajes informáticos (2020). DOI: 10.1016 / j.cola.2019.100940
© 2021 Science X Network
Citación: Una técnica para generar automáticamente componentes de hardware para sistemas robóticos (2021, 21 de octubre) recuperado el 22 de octubre de 2021 de https://techxplore.com/news/2021-10-technique-automatically-hardware-components-robotic.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, no se puede reproducir ninguna parte sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.


GIPHY App Key not set. Please check settings