. DOI: 10.1016/j.isprsjprs.2022.04.027″ width=»800″ height=»328″/><figcaption class=")
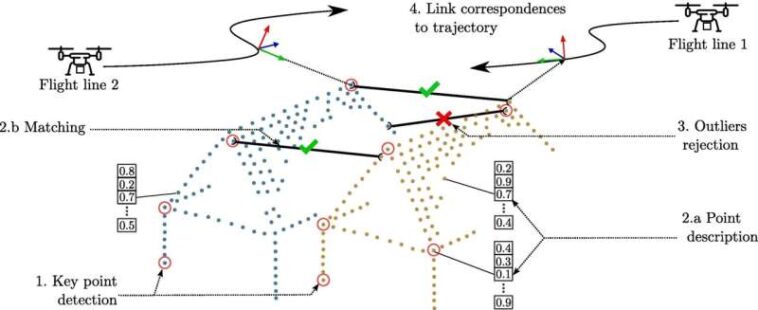
Descripción general de los pasos para conectar trayectorias a través de observaciones de pulso LIDAR a través del principio clave de detección y coincidencia punto a punto. Dos nubes de puntos LIDAR superpuestas y desalineadas en azul y naranja están relacionadas con una parte de dos líneas de vuelo superpuestas 1 y 2. Crédito: Revista ISPRS de fotogrametría y teledetección (2022). DOI: 10.1016/j.isprsjprs.2022.04.027
El mapeo tridimensional (3D) es una herramienta muy útil, como para monitorear sitios de construcción, rastrear los efectos del cambio climático en los ecosistemas y verificar la seguridad de carreteras y puentes. Sin embargo, la tecnología utilizada actualmente para automatizar el proceso de mapeo es limitada, lo que lo convierte en un esfuerzo largo y costoso.
«Actualmente, Suiza está mapeando todo su paisaje utilizando escáneres láser aerotransportados, por primera vez desde 2000. Pero el proceso llevará de cuatro a cinco años, ya que los escáneres tienen que volar a una altitud inferior a un kilómetro para recopilar datos con suficiente detalle y precisión», dice Jan Skaloud, científico sénior del Laboratorio de Ingeniería Geodésica (Topo) dentro de la Escuela de Arquitectura, Ingeniería Civil y Ambiental (ENAC) de la EPFL. «Con nuestro método, los topógrafos pueden enviar escáneres láser a una altura de hasta cinco kilómetros y aun así mantener la precisión. Nuestros láseres son más sensibles y pueden emitir luz sobre un área mucho más amplia, lo que hace que el proceso sea cinco veces más rápido».
El método se describe en un artículo publicado en Revista ISPRS de fotogrametría y teledetección por Davide Cucci, investigador asociado sénior en el Centro de Investigación de Estadística de la Escuela de Economía y Gestión de Ginebra de la Universidad de Ginebra, que trabaja regularmente con Topo, Jan Skaloud y Aurélien Brun, autor principal, recién graduado de maestría de EPFL y ganador de un premio de la Asociación de Ingenieros Topógrafos de Suiza Occidental (IGSO).
Perdiendo el punto
Los escáneres láser LiDAR emiten millones de pulsos de luz sobre las superficies para crear gemelos digitales de alta resolución (réplicas de objetos o paisajes basadas en computadora) que se pueden usar en arquitectura, sistemas viales y fabricación, por ejemplo. Los láseres son particularmente efectivos para recopilar datos espaciales, ya que no dependen de la luz ambiental, pueden recopilar datos precisos a grandes distancias y esencialmente pueden ver a través de la vegetación. Pero la precisión de los láseres a menudo se pierde cuando se montan en drones u otros vehículos en movimiento, especialmente en áreas con numerosos obstáculos como ciudades densas, sitios de infraestructura subterránea y lugares donde las señales de GPS se interrumpen. Esto da como resultado brechas y desalineaciones en los puntos de datos utilizados para generar mapas 3D (también conocidos como nubes de puntos láser) y puede conducir a una visión doble de los objetos escaneados. Estos errores deben corregirse manualmente antes de poder utilizar un mapa.
«Por ahora, no hay forma de generar mapas 3D perfectamente alineados sin un paso de corrección de datos manual», dice Cucci. «Se están explorando muchos métodos semiautomáticos para superar este problema, pero el nuestro tiene la ventaja de resolver el problema directamente en el nivel del escáner, donde se toman las medidas, eliminando la necesidad de realizar correcciones posteriormente. También está totalmente controlado por software , lo que significa que los usuarios finales pueden implementarlo de forma rápida y sin problemas».
En el camino hacia la automatización
El método Topo aprovecha los avances recientes en inteligencia artificial para detectar cuándo un objeto dado ha sido escaneado varias veces desde diferentes ángulos. El método consiste en seleccionar las correspondencias e insertarlas en lo que se denomina Red Dinámica, con el fin de corregir las lagunas y desalineaciones en la nube de puntos láser.
«Estamos trayendo más automatización a la tecnología de mapeo 3D, lo que contribuirá en gran medida a mejorar su eficiencia y productividad y permitirá una gama mucho más amplia de aplicaciones», dice Skaloud.
Nuevo y mejorado software de mapeo de drones
Aurélien Brun et al, Correspondencias Lidar punto a punto para el registro riguroso de escaneo cinemático en redes dinámicas, Revista ISPRS de fotogrametría y teledetección (2022). DOI: 10.1016/j.isprsjprs.2022.04.027
Citación: La pieza que falta para un mapeo 3D más rápido, económico y preciso (19 de mayo de 2022) consultado el 14 de julio de 2022 en https://techxplore.com/news/2022-05-piece-faster-cheaper-accurate-3d.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.

