. DOI: 10.1139/dsa-2023-0135")
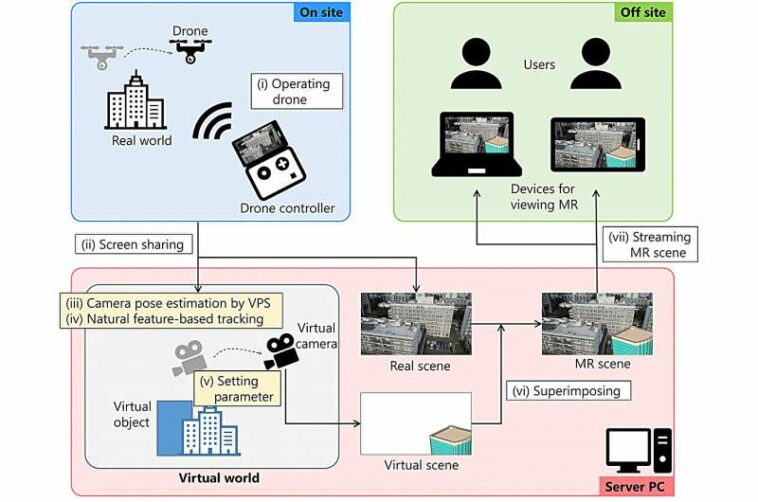
Descripción general del método propuesto. Mientras que los métodos anteriores operan drones de acuerdo con rutas de vuelo predefinidas, el método propuesto integra VPS y seguimiento basado en características naturales para estimar la posición del drone, haciendo coincidir así el movimiento del mundo real y del mundo virtual. Crédito: Sistemas y aplicaciones de drones (2024). DOI: 10.1139/dsa-2023-0135
Un grupo de investigación de la Universidad de Osaka ha desarrollado un innovador sistema de posicionamiento alineando correctamente las coordenadas del mundo real y virtual sin necesidad de definir rutas previamente. Esto se logra integrando dos métodos de estimación de autoubicación basados en la visión: sistemas de posicionamiento visual (VPS) y seguimiento basado en características naturales.
Este desarrollo conducirá a la realización de una realidad mixta (MR) basada en drones versátil utilizando drones disponibles en el mercado. La investigación es publicado en el diario Sistemas y aplicaciones de drones.
Se espera que la RM basada en drones se utilice en una variedad de aplicaciones en el futuro, como la simulación del paisaje urbano y el apoyo a trabajos de mantenimiento e inspección, lo que contribuirá a un mayor desarrollo de las aplicaciones de drones, especialmente en los campos de la arquitectura, la ingeniería y la construcción. (AEC).
En los últimos años, ha habido un interés creciente en la integración de drones en diversos sectores, particularmente dentro de AEC. El uso de drones en AEC se ha ampliado debido a sus características superiores en términos de tiempo, precisión, seguridad y costo.
La combinación de drones con MR destaca como una vía prometedora, ya que no está restringida por el rango de acción del usuario y es eficaz a la hora de realizar simulaciones de paisajes para espacios a gran escala, como ciudades y edificios.
, se puede leer que la precisión de posicionamiento del sistema propuesto en este estudio es mayor. Crédito: Sistemas y aplicaciones de drones (2024). DOI: 10.1139/dsa-2023-0135")
Una comparación de la precisión de posicionamiento entre el sistema propuesto de este estudio y el sistema del estudio anterior. En comparación con los resultados del estudio anterior (columna derecha), se puede leer que la precisión de posicionamiento del sistema propuesto en este estudio es mayor. Crédito: Sistemas y aplicaciones de drones (2024). DOI: 10.1139/dsa-2023-0135
Estudios anteriores propusieron métodos para integrar la resonancia magnética y los drones comerciales utilizando tecnologías versátiles como el uso compartido de pantalla y la transmisión por secuencias; sin embargo, estos métodos requerían rutas de vuelo de drones predefinidas para que coincidieran con los movimientos del mundo real y virtual, lo que reducía la versatilidad de la aplicación y limitaba los casos de uso de la RM.
Si bien esta investigación no implementa una aplicación de RM basada en drones para uso real, el sistema de alineación propuesto es muy versátil y tiene potencial para varias funcionalidades adicionales en el futuro.
Esto nos acerca un paso más a la realización de aplicaciones de RM centradas en drones que se puedan utilizar durante todo el ciclo de vida de los proyectos arquitectónicos, desde las etapas iniciales de diseño y planificación hasta etapas posteriores, como el mantenimiento y la inspección.
El primer autor, Airi Kinoshita, dice: «La integración de drones y MR tiene el potencial de resolver diversos problemas sociales, como los de planificación urbana y desarrollo y mantenimiento de infraestructura, respuesta a desastres y ayuda humanitaria, protección cultural y turismo, y conservación ambiental al liberar Los usuarios de RM se liberan de las limitaciones de experimentar solo su vecindad inmediata, lo que permite la expresión de RM desde una perspectiva más libre».
Más información:
Airi Kinoshita et al, Realidad mixta basada en drones: mejora de la visualización para simulaciones al aire libre a gran escala con adaptación dinámica del punto de vista utilizando métodos de estimación de pose basados en visión, Sistemas y aplicaciones de drones (2024). DOI: 10.1139/dsa-2023-0135
Citación: El sistema de posicionamiento mejora la versatilidad y la precisión de las aplicaciones de realidad mixta con punto de vista de drones (3 de junio de 2024), obtenido el 4 de junio de 2024 de https://techxplore.com/news/2024-06-positioning-versatility-accuracy-drone-viewpoint.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.

GIPHY App Key not set. Please check settings